- CKVisionBuilder
CKVisionBuilder是创科推出的自主研发的的智能机器视觉软件,该软件的算法为创科自主研发,达到国际一流水平。它不仅是一款不用编写代码就可以实现多功能组合的高性能、多用途软件,还拥有无与伦比的开发速度,可以完全按照开发者的意图实现各种逻辑流程。更重要的是它同时提供强大的运算处理能力,拥有丰富并经过长期测试验证的算法工具,可极大快速的满足广大客户为非标设备定制机器视觉系统开发软件的要求。

CKVisionBuilder
国际一流的机器视觉平台



极致体验
稳如磐石
二次开发
您想要的功能,鼠标一触即达。丰富的视觉算法、工具模块化、即拖即用,支持多线程运作,适合所有的机器视觉项目。在10分钟内就可以快速建立视觉工程,一切操作都如丝般顺滑。
基于创科视觉SDK开发,二十年的机器视觉行业应用经验,保证了检测精准,稳定,可靠。同时软件内置提供大量的工程案例,在现有的测试环境下进行产品测试,能马上预见结果。
提供对软件进行二次开发的接口及范例代码,用户可以添加自己的硬件或自己的算法。同时CKVisionBuilder也提供的API的方式给用户来快速开发视觉的应用软件。



多融合广支持
性能卓著
AI/深度学习算法
支持多种品牌相机同时运行、支持多任务、支持上百种算法、支持程序的分支/跳转/循环/判断、支持通信方式的TCP/IP、RS232、I/O、支持二次开发、支持最多16个画面、支持程序的多重调用。
使用C语言开发,结合Intel芯片加入指令支持SSE、CRC32等,支持亚像素图像匹配可达毫秒级,自然快人一步。 采用事件驱动以及异步的消息传递机制确保CPU得到最有效的利用。
在最新的平台中加入了AI/深度学习算法,可以更准确地检测出缺陷,判断产品的质量。同时对字符的读取有了质的提高。



简单易用
界面简洁
高性价比
基于菜单驱动,无需敲任何一个代码、拖拽式搭建,轻松选择您想要的功能。所有工具均提供默认参数,无需修改,可满足大部分情况下的使用。 所见即所得,立竿见影,快速了解每一个变化所带来的影响。
界面简洁,大方。各功能模块之间的逻辑关系衔接简单明了;步骤简单、周期短,布局合理,既减少资源的占用。
与国外同类产品相比,高性能,高性价比。操作简单,配中英文说明书。无需懂编程的软件工程师既可以操作,提供免费的线上,线下培训和试用版及说明书









CKVisionBuilder是创科推出的自主研发的的智能机器视觉软件,该软件的算法为创科自主研发,达到国际一流水平。它不仅是一款不用编写代码就可以实现多功能组合的高性能、多用途软件,还拥有无与伦比的开发速度,可以完全按照开发者的意图实现各种复杂的检测流程。更重要的是它同时提供强大的运算处理能力,拥有丰富并经过长期测试验证的算法工具,可极大快速的满足广大客户为非标设备定制机器视觉系统开发软件的要求。
| 特 点 |
● 入门简单
● 不用编程
● 拖拽式操作
● 适用于多种行业
● 支持自定义界面
● 支持多任务并行
● 支持用户开发算法工具
● 支持标准Modbus协议
● 支持多种PLC通讯协议
| 软件优势 |
1、通用型视觉软件
集成各类主流算法、相机接口、通讯端口等,可自由组合应对不同的使用场景。
2、丰富的算法模块
软件集成上百种算法,包括图像预处理、灰度匹配、轮廓匹配、BLOB分析、图像对比、轮廓检测、边缘检测、间距检测、直线检测、圆形检测、几何计算、颜色识别、字符读取、条码和二维码读取等。
3、软件算法优势
软件所有算法都经过公司十多年的研发迭代改进,具有速度快、精度高和可靠性强等特点,可达到毫秒级和亚像素精度级别。
4、模块化和可视化
软件功能模块化,使用拖拽式操作,只需将各种功能模块拖拽到流程中进行组合,操作过程可视化,方便用户调整参数,使用简单。
5、多任务异步或并行
软件支持多任务异步或并行处理,可以满足自动化生成过程中多工位检测需求。
6、AI/深度学习
CKVisionBuilder 4.0 新增AI/深度学习功能,针对缺陷检测、字符检测与识别提出解决方案。
| 丰富的软件功能 |

颜色识别 | 2D/3D测量 | |
 |  | |
产品定位 | 条码/二维码识别 | |
 |  | |
缺陷检测 | 字符识别 | |
 |  |
| 多种强大的预处理功能 |
均衡处理 | 亮度修正 | |
 |  | |
当所测目标物表面产生了阴影或者不均匀光量,会影响测试的稳定性,均衡处理功能可以补偿,使得检测的图像为最佳图像效果,即使每次光量状况均发送变化吗,仍可以实时补偿。 | 当所测目标物因照明变化所导致的图像亮度变化会影响检测的稳定性,亮度修正功能可以每次检测时与基准图像的亮度进行补正,降低随照明劣化而产生的检测值波动。 | |
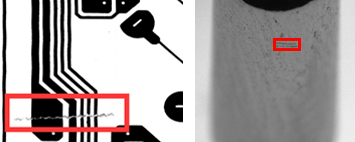
模糊处理 | 中值滤波 | |
 |  | |
在检测目标物的图片上采用模糊处理效果,最大效果的排除背景的细微噪点或干扰,通过刻意模糊图像,消除检测对象中不需要的特征点,实现稳定检测。图片为铜管焊接部位的宽度检测。 | 当检测的目标物因为图像噪点过多以及检测范围内的浓度分布,转换为有对比度差的图像,有效改善因工件反射率导致图像处理无法获取充分阶调,导致检测不稳定时,中值滤波可以 有效去除不需要的噪点。 | |
图像增强 | Sobel | |
 |  | |
图像增强可以改善图像的清晰度和对比度,图像更清楚、边界更清楚。检测的稳定性和精度更高。 | Sobel 是一阶梯度算子,用于边缘检测。边缘是指图像局部强度变化最显著的部分。是图像分割、纹理特征和形状特征等图像分析的重要基础。 | |
腐蚀 | 膨胀 | |
 |  | |
腐蚀算子用来删除对象边界的某些像素,具有收缩图像(亮度部分)的作用。 | 膨胀算子用来添加对象边界的某些像素,具有扩大图像(亮度部分)的作用。 |
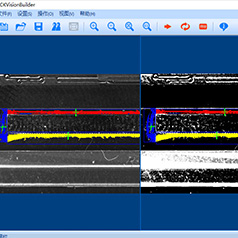
| 高稳定的图像算法 |
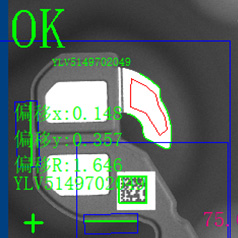
定位功能
基于形状的轮廓定位 | 基于边缘的图像定位 | |
 |  | |
创科基准定位功能可以根据产品的不同,做多样化的定位,比如:基于轮廓的形状匹配及定位,基于字符的形状匹配和定位,基于产品边缘的形状匹配及定位,基于灰度的匹配和定位等。 | 创科基准定位功能可以根据产品的不同,做多样化的定位,比如:基于轮廓的形状匹配及定位,基于字符的形状匹配和定位,基于产品边缘的形状匹配及定位,基于灰度的匹配和定位等。 | |
基于灰度匹配定位 | 中值滤波 | |
 | ||
创科基准定位功能可以根据产品的不同,做多样化的定位,比如:基于轮廓的形状匹配及定位,基于字符的形状匹配和定位,基于产品边缘的形状匹配及定位,基于灰度的匹配和定位等。 |
几何检测功能
尺寸测量 | 周长检测 | |
 |  | |
尺寸测量:利用检测间距工具等 创科高精度的测量算法,可以快速的检测出产品的宽度,高度和长度。 | 通过高精度检测边缘,检测直线等工具,可以快速的测量出产品的长度,宽度,角度和周长等数据。 | |
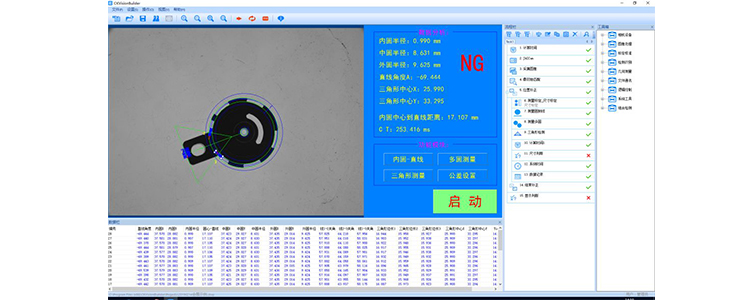
圆形测量 | 中值滤波 | |
 | ||
通过创科高精度的圆形测量工具,可以测出产品内径,外径和周长等数据。 | ||
标定校准功能
位置补正 | 图片校准 | |
 |  | |
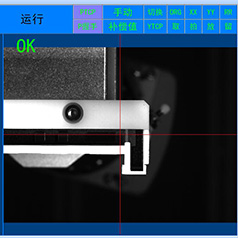
位置补正功能主要用于纠正 ROI 的位置,当被检测目标的位置会发生变化的情况下需要对目标进行定位,并需要将检测该目标的所有 ROI 都跟随移动,这时就需要使用坐标系统工具。
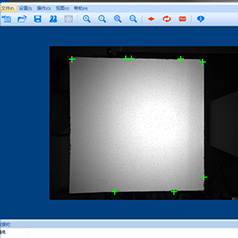
| 当所拍图像视野过大或者物距太高而使得图像本身产生畸变时,创科的图像标定工具可以将图片畸变校正。 |
检测识别功能
条码检测 | 二维码检测 | |
 |  | |
读取结果通过处理接口输出并可与设定值比较。 | 读取二维码,并通过处理接口输出与设定值比较。 | |
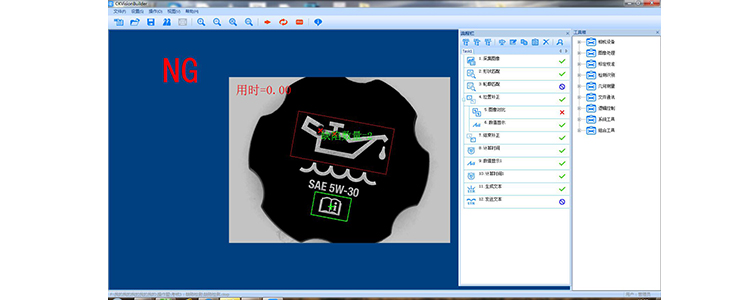
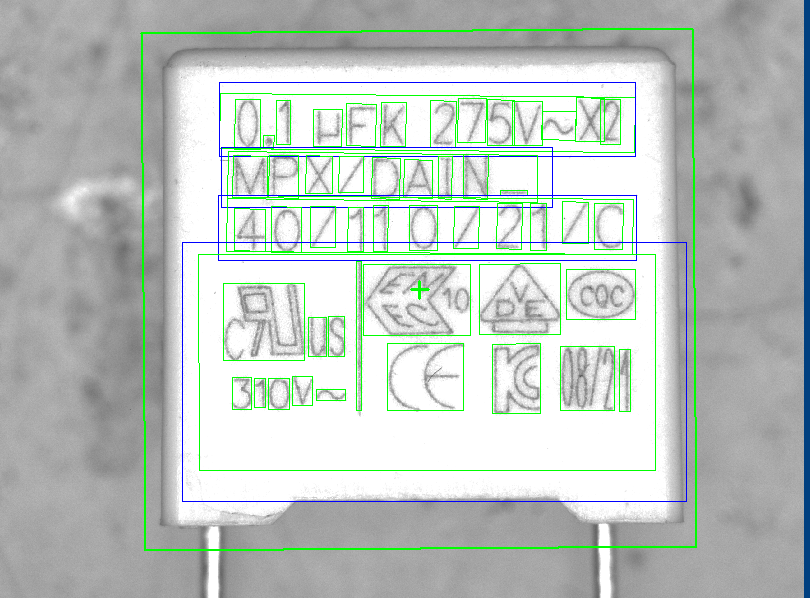
字符检测 | 中值滤波 | |
 | ||
读取数字和字符,并通过处理接口输出与设定值比较。 |
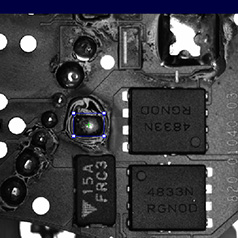
外观缺陷检测功能
缺陷检测 | 边界检测 | |
 |  | |
创科视觉软件可以与模板图片进行比较来检测产品瑕疵或者缺陷等,不仅具备卓越的检测能力,还可以筛选出大小,形状,数量等检测缺陷。 | 利用CKVisionBuilder软件的直线测量工具,可以测出产品边界突出或凹陷的缺陷。 | |
划痕检测 | ||
 | ||
利用CKVisionBuilder 软件的BLOB测量工具,可以测出产品表面是否有斑点或者划痕。 |
3D测量功能
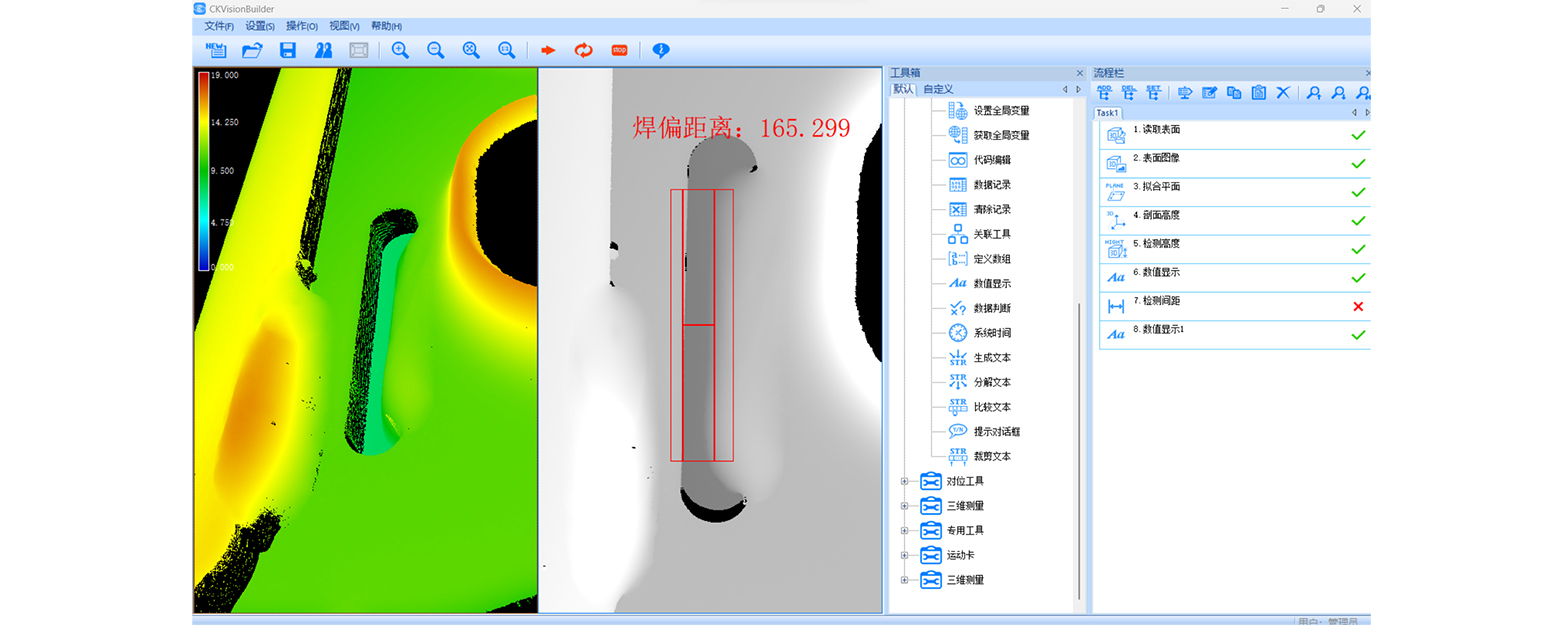
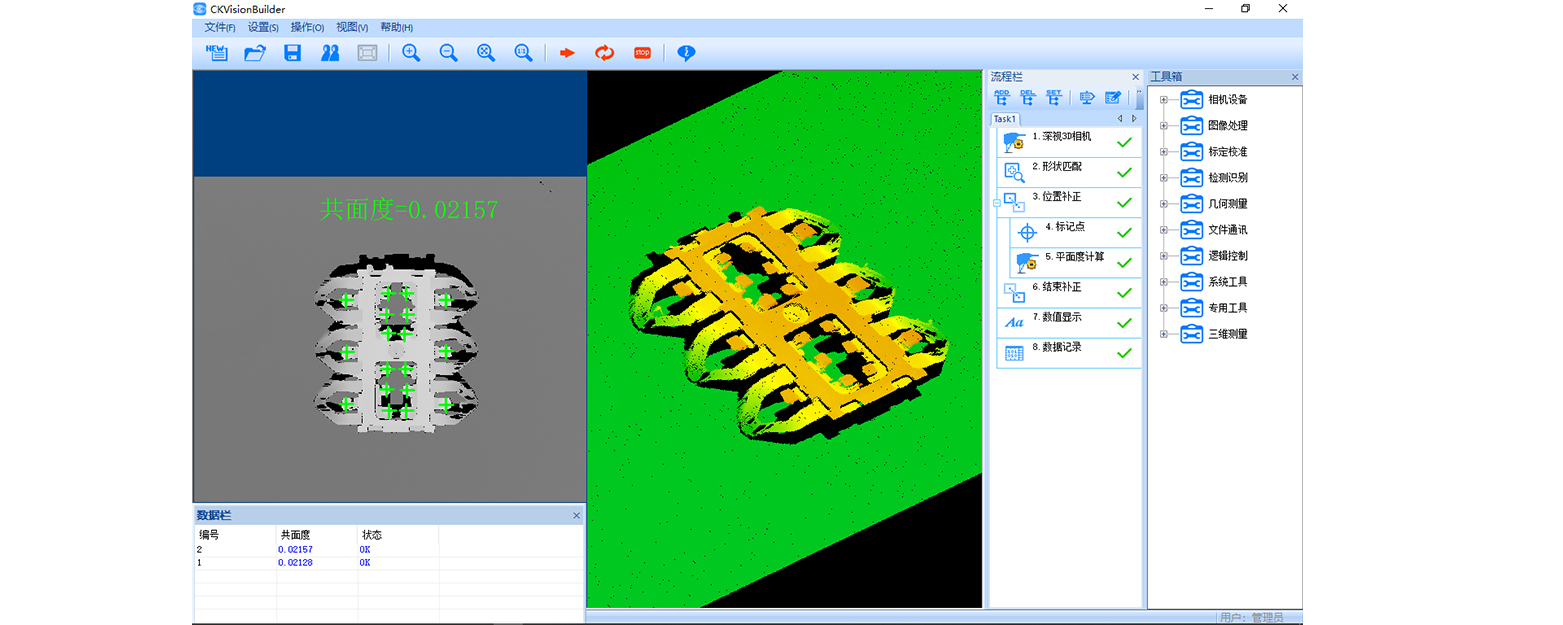
3D高度测量 | 3D平面度测量 | |
 |  | |
通过 3D相机拍摄产品,将物体表面的高度信息生产点云图,然后利用CKVisionBuilder智能视觉软件的高度测量工具可以测出图像中指定区域的平均高度值。 | 通过 3D相机拍摄产品,将物体表面的高度信息生产点云图,然后利用CKVisionBuilder智能视觉软件的平面度测量工具可以测出产品的高度值是否在同一个平面上。 |
AI/深度学习
创科深度学习训练工具是一款提供多种训练模型选择的软件,无缝集成到我司图像处理软件CKVisionBuider 4.0 中,该工具涵盖了目标检测、字符检测以及字符识别等任务。用户可以根据自身需求和应用场景选取合适的模型进行训练和使用,以高效准确地实现对图像视觉信息的识别、分类与检测。
目标检测缺陷检测 | OCR字符识别 | |
|
| |
通过对图像中目标进行分类框选、训练模型,使用模型推理预测新图片缺陷的类别及位置。 | 通过训练各种字符信息,使用模型推理预测目标字符。 |

| 性能卓越 |
 | 快速建立视觉工程 | |
 | 上百种工具及算法 | |
 | 提供多种形状的 ROI | |
 | 支持 Excel 格式 | |
 | 支持多种相机输入 | |
 | 支持多任务协作运行 | |
 | 提供多种结果输出功能 | |
 | 不需要编写代码 | |
 | 快速获取结果 | |
 | 提供大量工程案例参考 | |
 | 支持硬件加速功能 | |
 | 提供数据统计分析 | |
 | 支持机器人视觉引导 | |
 | 提供用户自定义界面功能 | |
 | 支持 Modbus 协议 |
| 可自行界面编辑 |

| 工具介绍 |



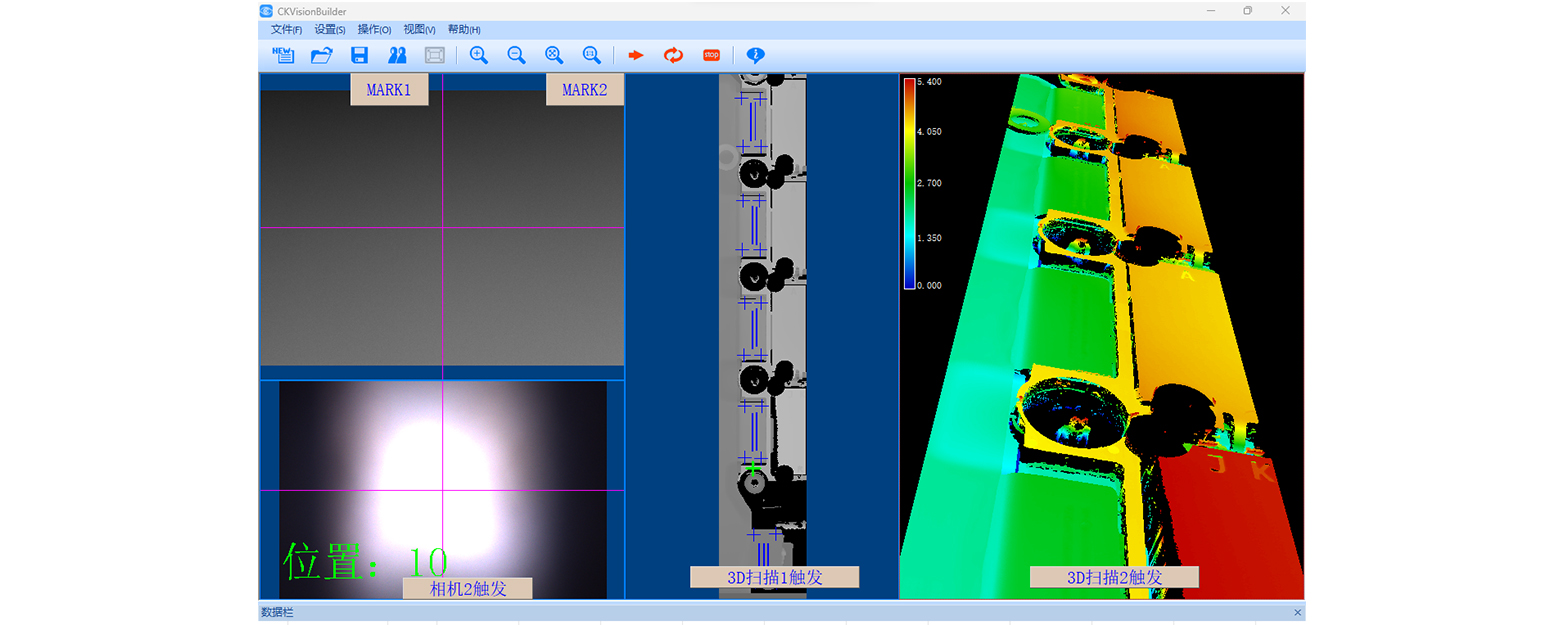
| 多线程运行:一套工具,多个工位,同时运行 |
软件支持多线程、多任务并行处理,各个任务之间可以完全独立运行或者相互关联的方式协作运行,以下为常见的多任务检测方式。

| 机器人视觉 |
轻构构建机器人视觉系统,与机械手控制器直接通讯

机械手利用CKVisionBuilder轮廓匹配工具获得饮料瓶盖中心位置的XY坐标值通过 TCPAIP将位置数据发送至机械手控制器并将零件抓取到指定位置。可以实现与各种机械手通过网口直接通讯。
 |  |  | ||
| 手机电池组装焊点检测 | 手机电池右盖帽机器视觉检测 | |||
 |  |  | ||
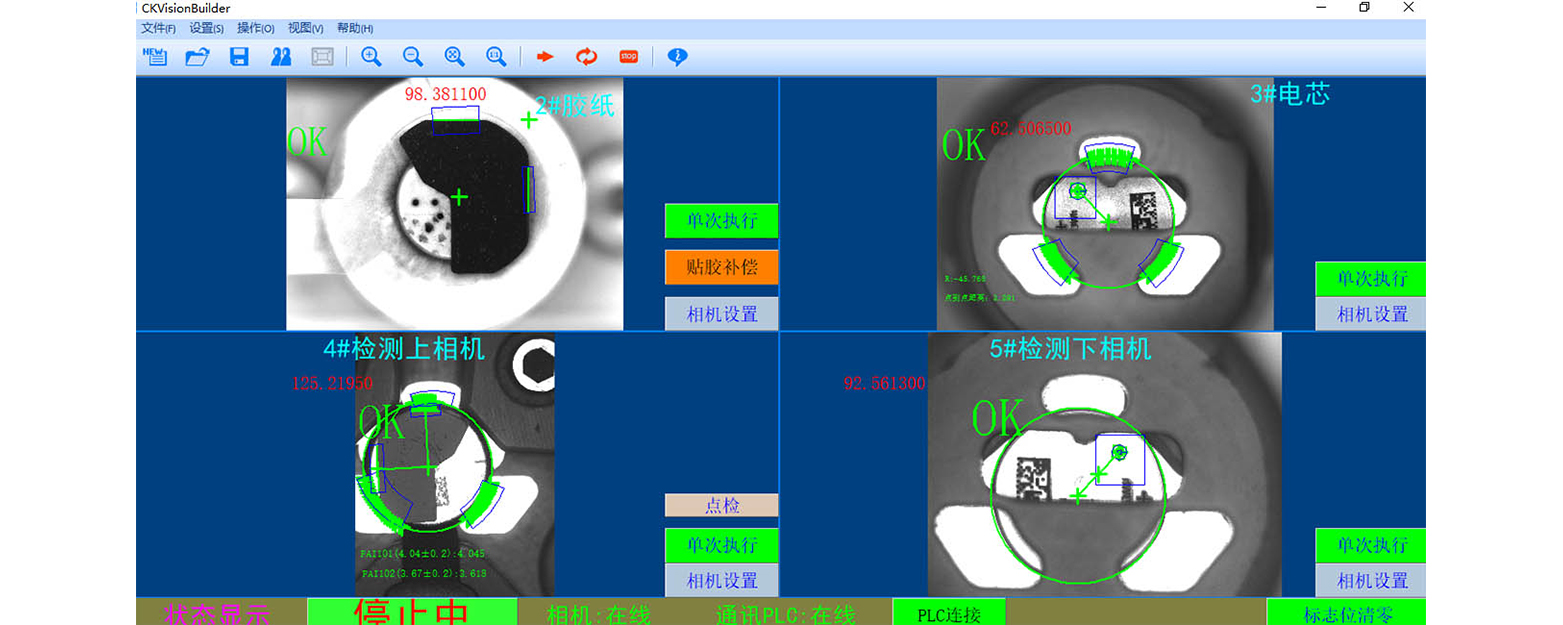
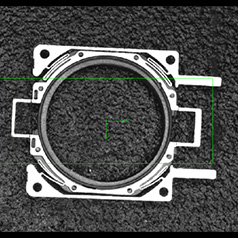
| 锂电池电芯Pack线检测系统 | 隔热板机器视觉检测 | 二极管字符检测 | ||
 | 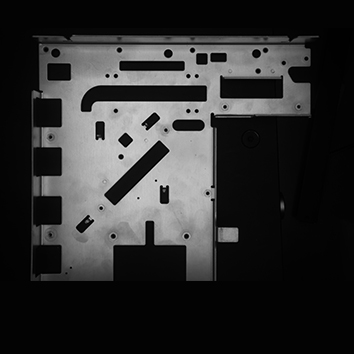 | 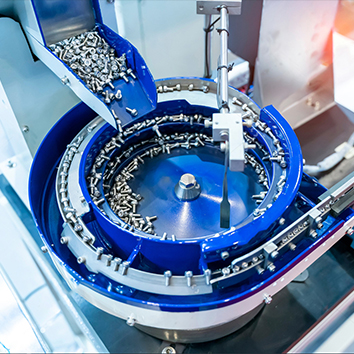 | ||
| 包装纸盒贴合机器视觉项目 | 金属板圆孔直径测量视觉方案 | 螺丝孔混料、同心度检测方案 | ||
 |  |  | ||
| 汽车档位字符检测 | 车载显示屏贴合视觉检测 | 手机电池扣入底座机器视觉项目 | ||
 |  |  | ||
| 手机绝缘胶对位贴合 | 点胶+定位机器视觉检测 | 字符缺陷视觉检测项目 |
关于我们的测试过程
CK的测试过程包括以下阶段:
1、与CK的销售工程师确定你的目标
因为每个视觉项目都代表一组独特的挑战。我们的目标是了解项目成功的关键因素。CK的销售工程师与您合作,了解您的测试目标是什么,以及哪些功能最能满足目标。
2、提出测试解决方案
一旦明确了测试目标,我们就提出了一个专门满足这些目标的解决方案。典型的提案概述了项目任务、可交付成果、进度和成本。我们使用您的测试需求和规范来设计满足您的目标的解决方案。
3、完善提案
如有必要,我们对提案进行改进,以便就满足所有指定测试标准、时间表和预算的最终计划达成共识。
4、执行计划
我们执行测试计划,使用我们行之有效的测试方法和行业最佳实践,按时、按预算完成所有测试任务。
在测试项目期间,将项目状态与缺陷报告和测试摘要进行通信。缺陷报告可在我们的销售工程师实时获取。
我们在项目执行期间以及测试项目的所有其他阶段提供个性化的关注。
5、项目完成和下一测试周期计划
在测试项目完成时,客户收到项目的最终可交付成果。这可能是最终的报告、测试自动化脚本或其他测试文档。
此外,大多数项目还会收到一份详细的状态报告,其中概述了测试项目的进度。这对于功能测试项目特别有用,在功能测试项目中,可以提供关于特定问题区域的有用摘要信息和进一步测试的建议。
然后,我们与客户一起确定是否需要另一个测试周期,如果需要,还需要多少进一步的测试。
* 为了能够及时处理信息并将结果反馈给您,建议通过邮件方式与我们联系:点击发送邮件
* 为了能够及时处理信息并将结果反馈给您,建议通过邮件方式与我们联系: 点击发送邮件
CkVisionBuilder V3.0 软件是创科视觉所开发的一款通用型智能机器视觉软件,从开始推出到广泛应用。不停的根据广大客户使用体验与实际应用反馈的问题,结合CK研发团队的实战经验与灵感,软件不断升级优化
为了您最佳的使用体验,我们建议您下载的最新版本
手册下载
| 第一次使用说明 Builder软件 | 软件使用手册 (简体中文版) | 软件使用手册 | 软件使用手册 | 软件产品介绍 | ||||
| 文件类型:PDF文档 | 文件类型:PDF文档 | 文件类型:PDF文档 | 文件类型:PDF文档 | 文件类型:PDF文档 | ||||
| 文件大小:1.2MB | 文件大小:6.99MB | 文件大小:7.07MB | 文件大小:6.40 MB | 文件大小:149.01MB | ||||
| 通信工具使用篇 | 对位工具使用篇 | 异常处理方案 | 3D工具使用篇 | 线扫工具使用篇 | ||||
| 文件类型:PDF文档 | 文件类型:PDF文档 | 文件类型:PDF文档 | 文件类型:PDF文档 | 文件类型:PDF文档 | ||||
| 文件大小:3.98 MB | 文件大小:2.47MB | 文件大小:873.12KB | 文件大小:3.38 MB | 文件大小: | ||||
| 工业相机接线图汇总 | 30天软件试用说明 | |
| 文件大小:1.06 MB | 文件大小:437 KB | |
软件下载
CKVisionBuilderV3.3.2.8_Win32 | CKVisionBuilderV3.3.2.8_Win64 | 30天试用插件 |
版本:V3.3.2.8 | 版本:V3.3.2.8 | |
文件大小:201MB | 文件大小:217MB | |
|
|
|
相机驱动下载
| AVT相机驱动 | 创科通用相机驱动 | MindVision相机驱动 | 大恒相机驱动 | MVViewer相机驱动 | ||||
| 文件大小:183MB | 文件大小:83.7MB | 文件大小:113MB | 文件大小:65.5MB | 文件大小:154MB | ||||
Basler 5.2.0.13457 | Fly Capture | Fly Capture | JAI_SDK_Version | ||||||
| 文件大小:285 MB | 文件大小:91KB | 文件大小:248MB | 文件大小:109MB | ||||||
| JAI_SDK_Version3.03_x86 | PCI1230_IO_Driver | PCIeNI6_IO_Driver | PCI130 IO卡驱动 | PCIeN16 IO卡驱动 | ||||||||
| 文件大小:84MB | 文件大小:2.24MB | 文件大小:484.2KB | 文件大小:2.24MB | 文件大小:484KB | ||||||||