
机器视觉中滤波算法的特点、原理及应用详解
引言
在机器视觉系统中,图像质量直接影响后续处理的准确性和可靠性。图像在采集、传输和存储过程中,会不可避免地受到各种噪声的污染,如传感器热噪声、量化噪声、传输干扰等。这些噪声会严重降低图像质量,影响特征提取、目标识别、边缘检测等关键算法的性能。图像滤波作为机器视觉预处理的核心技术,其目标是在抑制噪声的同时,尽可能保留图像的有用信息,如边缘、纹理、角点等重要特征。图像噪声可分为多种类型:高斯噪声呈正态分布,常见于电子设备;椒盐噪声表现为随机的黑白点,多由传输错误引起;泊松噪声与信号强度相关,常见于低照度成像;乘性噪声与信号本身相关,如相干斑噪声。不同的噪声类型需要采用不同的滤波策略。本文将系统深入地介绍机器视觉领域的主流滤波算法,从数学原理、算法特性、参数影响到实际应用,全面剖析各类滤波方法。
一、线性滤波算法
线性滤波是最经典的图像处理方法,其特点是输出像素值是输入像素值的线性组合。线性滤波可以通过卷积运算高效实现,在频域对应简单的乘法操作,计算效率高且理论完备。
1.1 均值滤波
均值滤波(Mean Filter)是最基础的平滑滤波器,其核心思想是用邻域内所有像素的算术平均值替代中心像素值。数学表达式为:
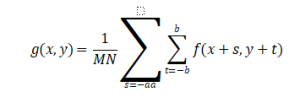
其中,f(x,y)表示原始图像在坐标(x,y)处的像素值g(x,y),为滤波后的输出值,滤波窗口大小为M*N,通常定义了(2a+1)*(2b+1)邻域范围。
均值滤波本质上是一个低通滤波器,其频率响应为:
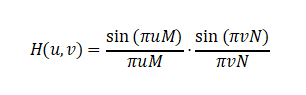
这种sinc函数特性使得均值滤波能够抑制高频噪声,但同时也会削弱高频细节信息。
算法特点:
- 实现极其简单,计算复杂度为O(MN),可通过积分图像优化至O(1)
- 对加性高斯噪声有一定抑制效果,噪声方差降低为原来的1/(MN)
- 所有邻域像素权重相同,未考虑空间距离和像素相关性
- 会导致图像显著模糊,边缘锐度严重下降
- 对椒盐噪声等脉冲噪声效果很差,异常值会被平均到整个邻域
应用场景: 均值滤波适用于对实时性要求极高、图像质量要求不严格的场景,如视频监控系统的快速预处理、嵌入式设备的轻量级去噪、作为复杂算法的初步平滑等。在工业视觉中,对于纹理较少的均匀表面缺陷检测,均值滤波可作为背景平滑的初步手段。
1.2 高斯滤波
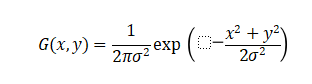
高斯滤波(Gaussian Filter)是一种加权平均滤波器,其权重系数服从高斯分布。与均值滤波相比,高斯滤波给予中心像素更大的权重,距离越远权重越小,这更符合自然图像的统计特性。
二维高斯函数定义为:
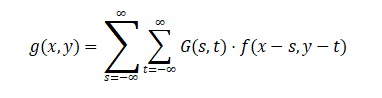
卷积操作表示为:
实际应用中,通常将高斯核截断到![]() 或
或![]() 范围内,此时包含了99%以上的能量。
范围内,此时包含了99%以上的能量。
高斯滤波具有重要的数学性质:
- 可分离性: 二维高斯核可分解为两个一维高斯核的乘积,即
 ,这使得计算复杂度从O(N²)降至O(2N)
,这使得计算复杂度从O(N²)降至O(2N) - 旋转不变性: 高斯函数具有圆对称性,滤波结果不依赖于坐标系选择
- 频域特性: 高斯函数的傅里叶变换仍是高斯函数,这是唯一具有此特性的函数
参数影响: 标准差![]() 是高斯滤波的核心参数,决定了滤波器的平滑程度。
是高斯滤波的核心参数,决定了滤波器的平滑程度。![]() 越大,高斯核越宽,平滑效果越强,但细节损失也越多。经验公式 :窗口大小通常取
越大,高斯核越宽,平滑效果越强,但细节损失也越多。经验公式 :窗口大小通常取![]() 。
。
应用场景: 高斯滤波是机器视觉中应用最广泛的平滑滤波器之一:
- 边缘检测预处理: Canny边缘检测算法首先使用高斯滤波降噪,确保梯度计算的稳定性
- 尺度空间构建: SIFT、SURF等特征检测算法通过不同的高斯滤波构建尺度金字塔,实现尺度不变性
- 图像金字塔: 在图像拼接、目标跟踪中,高斯金字塔提供多分辨率表示
- 深度学习预处理: 作为数据增强手段,高斯模糊增加模型的鲁棒性
- 光学成像模拟: 高斯点扩散函数模拟镜头的物理特性
1.3 拉普拉斯滤波
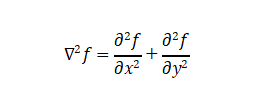
拉普拉斯算子是二阶微分算子,用于检测图像中的快速灰度变化,即边缘和细节。二维拉普拉斯算子定义为:
离散形式的拉普拉斯核常用形式为:
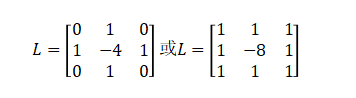
拉普拉斯滤波属于高通滤波器,增强高频成分,但同时也会放大噪声。为解决这一问题,常采用高斯-拉普拉斯(LoG)滤波器:
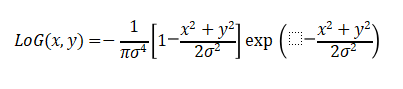
LoG算子先用高斯滤波平滑图像,再计算拉普拉斯,有效抑制噪声影响。在blob检测、零交叉边缘检测、图像锐化等应用中广泛使用。
二、非线性滤波算法
线性滤波虽然理论完善、计算高效,但存在固有缺陷:无法根据图像局部特性自适应调整,对脉冲噪声敏感,边缘保持能力差。非线性滤波通过引入非线性运算,能够更好地适应图像的复杂结构。
2.1 中值滤波


中值滤波(Median Filter)是一种基于排序统计的非线性滤波方法,用邻域内所有像素灰度值的中值替代中心像素值:
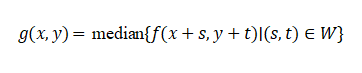
其中,表示滤波窗口,median表示取中值操作。
算法原理: 中值滤波的核心思想是利用中值对极端值不敏感的统计特性。对于包含n个元素的集合,中值是排序后位于中间位置的元素。当邻域中存在孤立的噪声点时,排序后这些噪声点会被排到两端,不会影响中值的选取,从而实现噪声抑制。
算法特点:
- 对椒盐噪声(脉冲噪声)具有极强的抑制能力,即使噪声密度达到2仍能获得良好效果
- 能较好地保持边缘锐度,因为边缘两侧的中值通常接近边缘本身
- 对高斯噪声的抑制效果不如线性滤波器
- 计算复杂度较高,标准算法为O(n log n),n为窗口大小
- 可能产生新的灰度值(对于偶数个元素),改变图像的灰度统计特性
- 对细小线条和尖锐角点有一定的削弱作用
改进算法:
- 加权中值滤波: 给不同位置的像素赋予不同的权重(重复次数),中心像素权重更大
- 自适应中值滤波: 根据噪声密度自动调整窗口大小,公式为:如果Zmin<Zmed<Zmax则输出Zmed,否则增大窗口
- 矢量中值滤波: 用于彩色图像,考虑RGB三通道的联合统计特性
应用场景: 中值滤波在以下领域应用广泛:
- 文档图像处理: 扫描文档常含椒盐噪声,中值滤波能有效去除而不模糊文字
- 医学影像: MRI、CT图像中的脉冲噪声处理,保持病灶边缘清晰
- 工业检测: 金属表面检测中去除随机亮点暗点,保持缺陷边缘
- 视频处理: 去除传输过程中的随机误码
- 指纹识别: 预处理阶段去除孤立噪声点,保持指纹纹线连续性
2.2 双边滤波
双边滤波(Bilateral Filter)是一种同时考虑空间域和值域相似性的非线性滤波器,由Tomasi和Manduchi于1998年提出。其创新之处在于引入了灰度相似性权重,实现了保边平滑。
完整的数学表达式为:
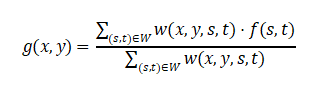
其中权重函数定义为:

第一项Gσs是空间域高斯核,度量空间距离;第二项Gσr是值域高斯核,度量灰度差异。
算法原理: 双边滤波的关键思想是:只有在空间上接近且灰度值相似的像素才应该参与平滑。在均匀区域,邻域像素灰度相似,值域权重接近1,执行类似高斯滤波的平滑;在边缘区域,边缘两侧像素灰度差异大,值域权重接近0,相互之间不进行平滑,从而保持边缘锐度。
参数影响:
- σs(空间域标准差): 控制空间邻域大小,越大平滑范围越广
- σr(值域标准差): 控制灰度相似性阈值,越大则更多像素参与平滑,边缘保持能力下降
- 典型值: σs取3-10像素,σr取图像灰度范围的10%-20%
算法特点:
- 优秀的边缘保持能力,被称为”保边滤波”的代表算法
- 对高斯噪声和小幅度噪声有良好抑制效果
- 计算复杂度高,标准实现为O(N²r²),N为图像大小,r为滤波半径
- 非线性操作导致频域分析困难
- 参数选择较为敏感,需要根据具体应用调整
- 可能在强噪声下产生”阶梯效应”
加速算法:
- 快速双边滤波: 利用信号处理技巧降低复杂度至O(N)
- 双边网格: 在降采样的3D空间(x,y,灰度)中进行滤波
- 引导滤波: 作为双边滤波的高效近似,具有O(N)复杂度且与窗口大小无关
应用场景:
- HDR成像: 色调映射中保持场景细节和边缘
- 图像融合: 多聚焦图像融合,保持清晰区域边界
- 深度图处理: 深度图平滑,保持物体边界
- 人像美颜: 皮肤平滑同时保持五官轮廓
- 立体匹配: 视差图优化,保持深度不连续性
- 去雾算法: 暗通道先验中的软抠图步骤
2.3 形态学滤波
数学形态学(Mathematical Morphology)是一种基于集合论的图像分析方法,通过结构元素与图像的相互作用提取图像特征。形态学滤波的基本操作包括腐蚀和膨胀。
腐蚀(Erosion)定义为:

膨胀(Dilation)定义为:

其中,B为结构元素,![]() 为B的反射。
为B的反射。
基于腐蚀和膨胀,可定义更复杂的形态学操作:
开运算(Opening):先腐蚀后膨胀
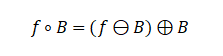
开运算能够消除小的明亮区域,平滑物体轮廓,断开细小连接。
闭运算(Closing):先膨胀后腐蚀
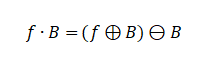
闭运算能够填充小的暗区域,连接邻近物体,填充细小裂缝。
形态学梯度:
形态学梯度提取物体边缘,相比传统梯度算子更鲁棒。
顶帽变换(Top-hat):
提取比结构元素小的明亮特征。
黑帽变换(Black-hat):
提取比结构元素小的暗特征。
结构元素设计: 结构元素的形状和大小决定了形态学操作的效果:
- 方形: 各向同性,适合一般用途
- 圆形: 旋转不变,适合无方向性特征
- 线形: 检测特定方向的结构
- 十字形: 保持连通性
应用场景:
- 二值图像处理: 去除噪声点,填充孔洞,提取骨架
- OCR预处理: 字符分割,笔画修复
- 工业检测: 表面缺陷检测,粒子分析,尺寸测量
- 生物医学: 细胞计数,组织分割
- 文档分析: 版面分析,表格提取
- 交通监控: 车辆提取,牌照定位
2.4 各向异性扩散滤波
各向异性扩散(Anisotropic Diffusion)由Perona和Malik提出,是一种偏微分方程(PDE)驱动的滤波方法。其基本思想是根据图像局部梯度自适应调整扩散强度,在均匀区域进行各向同性扩散,在边缘区域抑制垂直于边缘方向的扩散。
偏微分方程表示为:
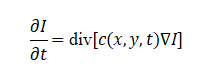
其中,I为图像,t为演化时间,div为散度算子,∇为梯度算子,c(x,y,t)为扩散系数。
扩散系数通常定义为梯度的递减函数:

其中,K为阈值参数,控制边缘强度。
算法特点:
- 在平滑图像的同时增强边缘,实现”边缘锐化去噪”
- 能够处理复杂的边缘结构和纹理
- 计算相对复杂,需要迭代求解PDE
- 参数选择影响重要,需要平衡去噪和边缘保持
应用: 医学影像增强、遥感图像处理、艺术风格化等。
三、频域滤波算法
频域滤波基于傅里叶变换理论,在频率域对图像进行处理。根据卷积定理,空域卷积等价于频域乘法,这为理解和设计滤波器提供了新的视角。
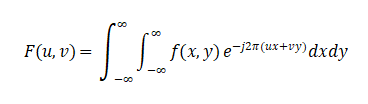
傅里叶变换:
离散形式(DFT):
3.1 低通滤波器
低通滤波器允许低频成分通过,抑制高频成分,实现图像平滑。
理想低通滤波器(ILPF):
其中,![]() 为频率点到中心的距离,
为频率点到中心的距离,![]() 为截止频率。
为截止频率。
理想低通滤波器具有锐利的频率截断特性,但会在空域产生明显的振铃效应(Ringing Effect),因为其空域响应为sinc函数,具有无限的空间支撑。
巴特沃斯低通滤波器(BLPF):
其中,n为滤波器阶数。巴特沃斯滤波器在通带和阻带之间提供平滑过渡,当n=1时振铃效应很小,随着n增大逐渐接近理想滤波器。
高斯低通滤波器(GLPF):
高斯低通滤波器没有振铃效应,因为高斯函数的傅里叶变换仍是高斯函数,空域响应平滑且空间局部化。
3.2 高通滤波器
高通滤波器抑制低频成分,保留高频成分,用于边缘增强和锐化。高通滤波器可通过![]() 从低通滤波器导出。
从低通滤波器导出。
应用: 边缘提取、图像锐化、纹理分析等。
3.3 带通和带阻滤波器
带通滤波器允许特定频率范围通过,用于提取特定频率的纹理或周期性模式。带阻滤波器(陷波滤波器)抑制特定频率,常用于去除周期性噪声,如扫描线干扰、莫尔条纹等。
选择性滤波应用: 去除电力线干扰(50Hz/60Hz)、去除打印网点模式、消除周期性纹理干扰等。
四、自适应滤波算法
自适应滤波器能够根据图像的局部统计特性自动调整滤波参数,在不同区域采用不同的处理策略,实现更智能的噪声抑制。
4.1 维纳滤波
维纳滤波(Wiener Filter)是最优线性滤波器,在最小均方误差(MMSE)准则下恢复退化图像。频域表达式为:
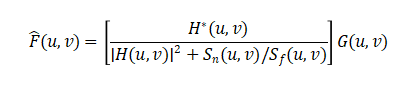
其中,![]() 为退化函数,Sn和Sf分别为噪声和原始信号的功率谱,
为退化函数,Sn和Sf分别为噪声和原始信号的功率谱,![]() 为退化图像的频谱。
为退化图像的频谱。
当信噪比很高时![]() ,维纳滤波退化为逆滤波器1/H;当信噪比很低时,维纳滤波执行较强的平滑。这种自适应特性使其在图像复原、去模糊等应用中表现优异。
,维纳滤波退化为逆滤波器1/H;当信噪比很低时,维纳滤波执行较强的平滑。这种自适应特性使其在图像复原、去模糊等应用中表现优异。
4.2 局部自适应滤波
基于局部统计特性的自适应滤波器根据邻域的方差调整滤波强度:
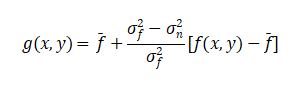
其中,![]() 为局部均值,
为局部均值,![]() 为局部方差,
为局部方差,![]() 为噪声方差。
为噪声方差。
在方差较小的均匀区域执行较强平滑,在方差较大的纹理和边缘区域保持原始值。
4.3 非局部均值滤波
非局部均值(Non-Local Means, NLM)滤波器利用图像的自相似性,搜索整幅图像中相似的图像块进行加权平均:
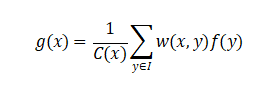
权重定义为:
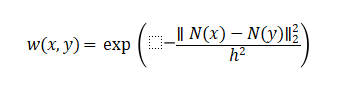
其中,N(x)和N(y)为以x和y为中心的图像块,h控制衰减速度。
NLM滤波器能够利用图像中重复出现的结构和纹理,在去噪的同时保留精细细节,特别适合自然图像和纹理丰富的场景。
五、深度学习去噪方法
近年来,基于深度学习的图像去噪方法取得了突破性进展,超越了传统滤波算法的性能上限。
5.1 卷积神经网络去噪
DnCNN、FFDNet等网络通过学习噪声图像到干净图像的映射,或者直接学习噪声残差,实现端到端的去噪。这些方法能够自适应不同的噪声类型和强度。
5.2 生成对抗网络
GAN可以生成更真实的纹理和细节,避免过度平滑。
5.3 注意力机制
注意力模块帮助网络聚焦于重要区域,提高边缘和细节的恢复质量。
六、滤波算法的选择策略
在实际应用中,选择合适的滤波算法需要综合考虑多个因素:
噪声类型: 高斯噪声→高斯滤波或维纳滤波;椒盐噪声→中值滤波;周期性噪声→频域带阻滤波
边缘保持需求: 需要精确边缘→双边滤波、各向异性扩散;可接受轻微模糊→高斯滤波
计算资源: 实时系统→均值滤波、快速引导滤波;离线处理→复杂自适应滤波或深度学习方法
图像特性: 纹理丰富→非局部均值;简单结构→基本线性滤波
应用领域: 医学影像要求高保真;工业检测强调稳定性;消费类应用注重视觉效果
结论
机器视觉中的滤波算法经历了从简单线性滤波到复杂自适应滤波,再到基于学习的智能滤波的发展历程。每种算法都有其独特的优势和适用场景,没有一种算法能够解决所有问题。现代机器视觉系统往往采用多种滤波算法的组合:首先使用高斯滤波进行初步平滑,然后用双边滤波保边去噪,最后结合形态学操作提取特征。随着计算能力的提升和深度学习技术的发展,基于神经网络的学习型滤波器正在成为新的研究热点,它们能够自动学习最优的滤波策略,适应各种复杂场景。然而,传统滤波算法因其理论完备性、可解释性和计算效率,在许多应用中仍然不可或缺。深刻理解各类滤波算法的数学原理、特性和应用,是构建高性能机器视觉系统的基础。